
Бесплатный фрагмент - Improving the process of driving a locomotive of Decision Support Systems
1. Introduction
The functioning of the ergatic system “train — locomotive driver” is conditioned by a number of factors, the main of which are the quality and timeliness of decision-making. Gradually the systems of driving a locomotive are developing in the direction of decreasing the role of locomotive crews in the process of driving the train, which allows reducing harmful influence of the human factor on the safety and effectiveness of the operation of rolling stock. The final stage of this development will be a transition to a fully automated control of trains.
At present, “the human factor” in operating a locomotive still plays a significant role and reduces transportation safety. This is illustrated by the accident that happened in Spain in 2013, where the accident involving a high-speed train occurred as a result of exceeding the speed by the driver, 80 people died and more than 140 were injured. Over the period from 2011 to 2015, 130 people throughout the world were killed as a result of the railway accidents caused by locomotive brigades [1]. Thus, the problem of improving the quality of driving decisions that a driver takes is relevant and requires further development of theoretical principles of its solution.
2. Literature review and problem statement
Nowadays a number of systems of automatic driving both long – distance trains [2] and local trains have been implemented [3]. For the automation of local trains and subway trains, the company Bombardier designed a new generation of train control systems CITYFLO 650 [4], which currently operates in thirteen cities around the world. In the subways of Santiago, Paris, Hong Kong and Beijing, Alstom company is implementing its design for automated train control [5]. The project Urbalis is supposed to increase the train frequency, at the same time ensuring high safety and increased comfort for passengers. An analysis of these foreign designs allows us to conclude that the use of automated train driving systems is a promising area of research that allows us either to reduce significantly or eliminate completely the negative impact of the human factor on traffic safety. However, a common drawback of these systems is the existence of limited number of parameters that are monitored, the increase in which leads to making the algorithms of automated systems operation even more complicated, which is the cause of a considerable rise in their price. On the other hand, the readjustment, when it is necessary to take into account specific conditions of a particular section, is very difficult in such systems. The projects lack the capacity to accumulate experience and to control the traffic independently in terms of improving the indices of previous travels, that is, the self – learning function is missing. This caused the locomotive driving systems to develop in the direction of intellectualization [6]. New methods and structures of intelligent driving systems for the rail transport are being developed [7] and the methods of forecasting technical condition of the rolling stock are being improved [8]. But the cited sources do not consider the process of making decisions by a locomotive crew, although this process is one of the most important. Its successful implementation allows a considerable increase in traffic safety and reduction of transportation costs. In [9], the intelligent system of driving a subway train was developed, but in order to use it on railways, it is necessary to solve a number of additional problems, namely, to develop mechanisms of interaction between the system and a dispatcher and other trains in the section, to train the system to make driving decisions at the wide range of changes of profile and the track plan, etc.
The current state of theoretical studies, aimed at improving the driving processes on railways, makes it possible to select two directions of solving this problem. The first direction is automation (from the automation of certain operations to the introduction of automated control of technological processes). In particular, Petri nets [10], the methods of finite automata [11–13] and the assertion mechanisms are used for this purpose. The second direction is associated with the use of the methods of artificial intelligence and paying more attention not to simulating a control object, but rather to formalizing the driving activity of a person-operator [14–16]. The advantages of the second approach are the possibility of making driving decisions by the system itself under conditions of uncertainty and incompleteness of information, and the possibility of self-learning and accumulating experience.
An analysis of the scientific literature leads to the conclusion that the modern development of the theory of systems of driving a locomotive, the software and the element base does not allow achieving a fully autonomous motion of trains. A transition stage to the unmanned locomotive driving is the implementation of intelligent locomotive decision support systems. At present, theoretical framework for the implementation of this task is not sufficiently developed. Such issues as the definition of the structure of a locomotive intelligent system, development of mathematical apparatus for describing fuzzy situations when driving a locomotive, and modeling the process of the system’s self-learning have not been studied enough. Left unaddressed is the question of development of dynamic knowledge bases for locomotive decision support systems.
3. The aim and tasks of the study
The aim of this work is to improve the process of driving a locomotive using intelligent decision support system for locomotive crews.
Achievement of this goal requires solution of the following tasks. It is necessary to develop a structure and architectural hierarchy of DSS for locomotive crews, which should include the possibility of controlling the occurrence of emergency and development of dangerous situations, as well as the capacity of self-learning and saving the experience of driving. Due to a wide range of factors affecting a train and a locomotive crew, and the existence of a considerable number of qualitative characteristics of the process, it is necessary to represent them in a formal view. The most appropriate is to use the methods of fuzzy mathematics and logic. Result of the locomotive DSS is the driving solution that is recommended under current situation. Therefore, there is the task of developing an approach to making driving decisions under conditions of uncertain train situation.
4. Methods and tools for designing locomotive decision support systems
4. 1. Structure and architectural hierarchy of DSS for locomotive crews
A distributed DSS for locomotive crews is a complex system with comprehensive interaction of the locomotive onboard systems located at a great distance; the quality of its organization determines efficiency of the system as a whole.
If P is the set of possible principles of constructing the system and its components; F is the set of interconnected functions performed by the system; A is the set of interconnected onboard locomotive systems, then, according to [15], the problem of synthesis of rational structure of a distributed DSS comes down to defining a set of principles of construction (p ϵ P), a set of functions performed by the system (f ϵ F (p)), a set of elements capable to implement the chosen principles and to perform functions (А ϵ А). It is also necessary to find the optimum display of elements of the set f on the elements of set А. When selecting the option of the structure of a complex system, there are two possible types of display f → А the first one is when each task is performed only by one of several possible nodes of the system, and the second one is when the task is preformed by several nodes of the system. The requirements to locomotive systems demand the second option of implementation.
When designing the optimal structure of distributed DSS, we will imply the process of gradual solution of the problems of synthesis of the main elements and parts of the system. The following problems are solved iteratively.
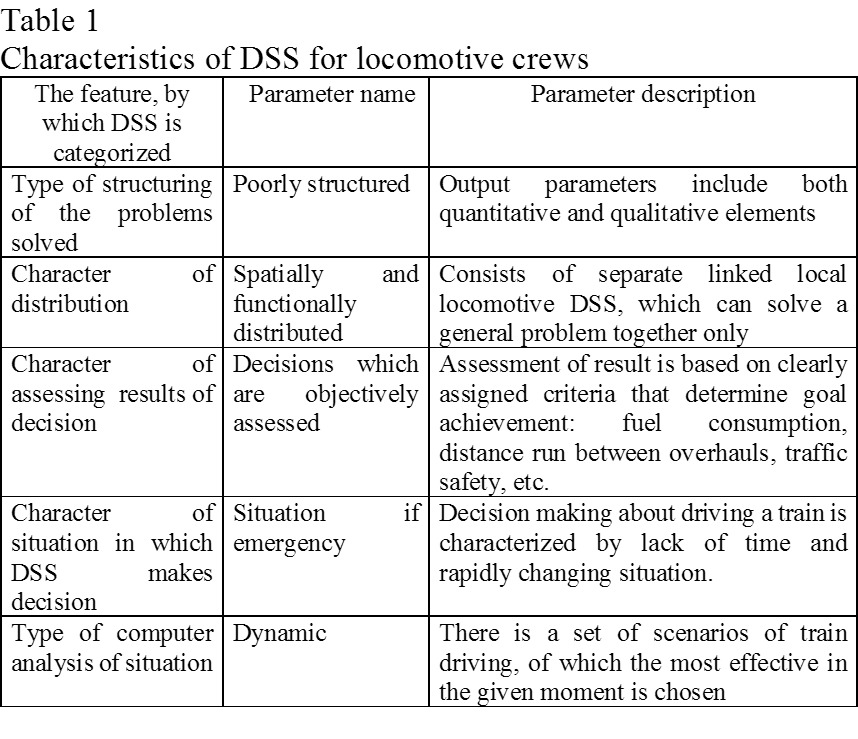
As a result of analysis of the existing types of intelligent systems, the hierarchies and algorithms of their work, and taking into account the working conditions of locomotive crews and railway transport as a whole, we developed the parameters of locomotive DSS (given in Table 1)
As a result of implementation of stages of the synthesis of locomotive DSS, the structure shown in Fig. 1 was obtained.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.