
Бесплатный фрагмент - Что должен знать и уметь оператор коптера
Пособие. Часть 1. Типы БЛА, конструкция квадрокоптера
СПИСОК СОКРАЩЕНИЙ
ВВЕДЕНИЕ
Современный этап развития БЛА характеризуется увеличением сфер применения БЛА и увеличением их номенклатуры, что обусловлено их достоинствами и преимуществами, в первую очередь по показателю эффективность/стоимость.
В военной сфере наиболее активно применяются в качестве БЛА поля боя и барражирующих боеприпасов БЛА мультироторного типа — коптеры, с помощью которых выполняется около 80% всех боевых задач. Особенно эффективны высокоманевренные коптеры-камикадзе (FPV-квадрокоптеры). Это, как правило, квадрокоптеры, оснащенные видеокамерой, передающей видеопоток в режиме реального времени на устройство оператора (очки или монитор), что создает иллюзию нахождения оператора в кабине БЛА. Еще одна особенность FPV-квадрокоптеров — управление в ручном режиме, без использования систем стабилизации полета. Поэтому для успешного выполнения полетного задания оператор должен хорошо знать устройство, аэродинамику, порядок эксплуатации, тактику применения БЛА, а также обладать уверенными навыками пилотирования, полученными в результате тренажной подготовки на симуляторах и в ходе практических полетов в помещениях и на открытых площадках. Вот почему подготовка оператора FPV-квадрокоптера включает в себя теоретическую, тренажерную и летную составляющие.
Данное пособие, состоящее из нескольких частей, составлено на основе изучения опыта подготовки операторов БЛА различных типов, в том числе и FPV-квадрокоптеров в различных учебных центрах, а также на основе собственного опыта обучения операторов, позволяет за 60 учебных часов получить необходимые знания по устройству, аэродинамике и динамике полета квадрокоптеров, подготовке и способах их применения, а также отработать начальные навыки управления FPV-квадрокоптерами на симуляторах, в помещениях и на открытой местности.
Предназначено для операторов, осваивающих квадрокоптеры различных типов, а также преподавателей и инструкторов.
1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
Беспилотное мобильное средство (БМС) — искусственный мобильный объект многоразового или условно-многоразового использования, не имеющий на борту экипажа (пилота) и способный самостоятельно целенаправленно перемещаться в пространстве для выполнения различных функций в автономном режиме (с помощью собственной управляющей программы) или посредством дистанционного управления оператором или диспетчерским центром.
БМС не являются объекты, которые не имеют собственных энергетической подсистемы и движителя (буксируемый исследовательский зонд или метеозонд, свободно дрейфующий в атмосфере).
Беспилотный летательный аппарат (БЛА) — летательный аппарат, предназначенный для выполнения полетов без экипажа на борту под управлением оператора БЛА с пункта (пульта) управления, в том числе без его визуального контакта с этим летательным аппаратом, или в заданном автономном режиме либо путем сочетания указанных способов.
Также БЛА именуются дронами или UAV (англ. unmanned aerial vehicle).
К БЛА не относятся ракеты, снаряды, бомбы (независимо от того, управляемые они или нет), аэростаты без двигателей и другие безмоторные летательные аппараты: планеры, дельтапланы, парапланы. Но относятся беспилотные дирижабли и планеры, моторные дельтапланы и парапланы.
БЛА классифицируются по конструкции, тактико-техническим характеристикам (размер и масса БЛА, дальность, высота, скорость и продолжительность полета БЛА) и по способу их применения.
2. КЛАССИФИКАЦИЯ БЛА ПО КОНСТРУКЦИИ
Конструкция ЛА зависит от принципа создания подъемной силы, который заложен в основу его полета. В настоящее время известны четыре принципа полета:
1. Баллистический.
2. Аэродинамический.
3. Ракетодинамический (реактивный).
4. Аэростатический.
Баллистический принцип полета — полет свободно брошенного тела под действием силы тяжести. Для полета по баллистическому принципу тело должно обладать начальным запасом высоты или скорости, поэтому баллистический полет называется пассивным.
Аэродинамический принцип полета основан на третьем законе Ньютона, согласно которому пластина, помещенная под каким-то углом в воздушный поток, надавливает на него и испытывает ответное давление со стороны потока.
Реактивный принцип полета также основан на третьем законе Ньютона, но взаимодействие летательного аппарата с окружающим его воздухом не является обязательным для него условием. Сущность реактивного принципа заключается в том, что необходимая для полета подъемная сила создается в результате сгорания топлива, при котором образуются газы, обладающие большой энергией. Эти газы, вытекая с большой скоростью из сопла двигателя наружу, создают реактивную силу противоположного направления.
Аэростатический принцип полета основан на законе Архимеда, по которому на тело, находящееся в газовой среде, действует подъемная сила, равная весу вытесненного им газа. По такому принципу летают дирижабли, аэростаты, воздушные шары.
В настоящее время наиболее распространены конструкции БЛА использующие аэродинамический и аэростатический принципы создания подъемной силы.
БЛА аэростатического типа — БЛА, подъемная сила которых создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Это, в основном, беспилотные дирижабли — ЛА легче воздуха, являющиеся комбинацией аэростата с движителем (винт (пропеллер, импеллер) с электродвигателем или ДВС) и системы управления ориентацией.
Основной недостаток таких БЛА — низкая маневренность, поэтому они как правило применяются в привязном варианте.

БЛА самолетного типа — БЛА, подъемная сила которых создается аэродинамическим способом: воздушным потоком, набегающим на неподвижное крыло.
Преимущества — большие продолжительность, потолок и скорость полета. Благодаря большой продолжительности полета и топливной экономичности БЛА с неподвижным крылом идеально подходят для дальних операций (картографирование, наблюдение).
Недостатки — невозможность зависания в воздухе, более высокие затраты на обучение персонала их управлению, необходимость использования для взлета взлетно-посадочной полосы (ВПП) или пусковой установки (катапульты), а для посадки — ВПП, парашюта или сети.

Существует большое разнообразие подтипов БЛА самолетного типа, различающихся по форме крыла и фюзеляжа. Практически все схемы компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой авиации, применимы и в беспилотной.
По способу старта и приземления БЛА самолетного типа подразделяют на аэродромный и безаэродромный (с руки, рампы, платформы, пускового устройства носителя).
Старт с руки в основном применяется для БЛА, чья масса не превышает 5 кг. Основное достоинство заключается в отсутствии каких-либо механизмов, что приводит к повышению надежности и простоте запуска, но, при этом, существенный недостаток заключается в низком уровне безопасности, так как при запуске двигатель работает на максимальных оборотах, и удержать такой аппарат может быть сложной задачей, не говоря о рисках для здоровья.

Старт и посадка с ВПП осуществляют БЛА, обладающих внушительными, масса-габаритными характеристиками. Например, российский «Орион», китайский «CH-4», американский «MQ-1 Predator».

Для взлета мало- и среднеразмерных БЛА используются пусковые устройства типа катапульты, позволяющие обеспечить быстрый и эффективный взлет с силовой установки сравнительно небольшой мощности.
Взлет с катапульты — самая популярная система запуска БЛА в связи с тем, что его работа происходит, в основном, в местах необорудованных ВПП.
Для запуска БЛА используются катапульты различных систем и методов получения пусковой энергии. Выбор типа катапульты зависит от массы БЛА, требований к взлетной площадке и времени подготовки к взлету.
Основные виды катапульт: пневматические, механические и эластичные.
Пневматические катапульты обладают относительно небольшими габаритными размерами и весом. Такой тип катапульт разгоняет БЛА с помощью сжатого воздуха. Механические катапульты могут использовать энергию падающего груза, лебедочный привод либо другие устройства.
Пневматические или механические катапульты используются чаще всего для запуска БЛА массой от 15 кг до 50 кг.
Самыми распространенными системами запуска БЛА являются эластичные катапульты, принцип работы которых заключается в силе, полученной в результате амортизации эластичного, чаще всего резинового, шнура.

Конструкция катапульты выполняется модульной, что позволяет снизить габаритные размеры в транспортировочном состоянии и обеспечить быструю сборку на месте проведения запуска.
БЛА вертолетного типа — БЛА, подъемная и движущая силы которых создаются одним или несколькими несущими винтами с приводом от одного или нескольких двигателей. Крыло или отсутствует, или выполняет вспомогательные функции.
Преимущества — способность зависания в точке, высокая маневренность.
Основные недостатки — небольшая скорость полета и сложная конструкция.

БЛА гибридного типа — БЛА вертикального взлета/посадки и полета по-самолетному, т. е. БЛА с изменяемым направлением вектора тяги.
Гибридные БЛА сочетают в себе преимущества БЛА с неподвижным крылом, такие как большие дальность и продолжительность полета, с преимуществами винтовых БЛА — возможность зависания.
Наиболее распространенными БЛА гибридного типа являются конвертопланы — БЛА вертикального взлета и посадки, который в полете движется как самолет с опорой на фиксированное крыло, при этом корпус остается в горизонтальном положении. Таким образом, этот БЛА ведет себя как вертолет при взлете и посадке, но как самолет в горизонтальном полете. Англоязычная версия названия конвертоплана — VTOL (Vertical Take Off and Landing).

Виды конвертопланов:
— тилтротор — конвертоплан с поворачивающимися гондолами (двигателями) или с поворачивающимися винтами (двигатели неподвижные), которые на взлете и при посадке работают как подъемные, а в полете — как тянущие или толкающие, при этом в полете подъемная сила обеспечивается крылом;
— тилтвинг (tilt — «наклонять» и wing — «крыло») — конвертоплан с поворачивающимся крылом с установленными на нем двигателями.
«Классические» конвертопланы имеют несколько вариантов размещения винтов: одиночный, расположенные над крылом или под крылом, а также сдвоенные. В некоторых конструкциях используют не открытые винты, а импеллеры, которые обладает очень высокой скоростью отбрасываемого воздушного потока, что позволяет обойтись очень маленькими крыльями, обеспечивая высокую компактность конвертоплана.

Встречается использование кэнардов — объединенных в блоки канальных электровентиляторов. Поворачивая такие кэнарды, БЛА может совершать вертикальный взлет, а затем лететь по-самолетному. Хвостовые кэнарды играют также роль рулей.
Еще одним видом БЛА гибридного типа являются тейлситтер — БЛА вертикального взлета, который, оказавшись в воздухе, поворачивается горизонтально и летит, как БЛА самолетного типа, а для посадки вновь возвращается в вертикальное положение и приземляется на специальные ребра, отходящие от крыльев и хвоста, которые служат ему опорой. От конвертопланов такую конструкцию отличает отсутствие поворотных элементов.
Достоинства — способность вертикального взлета, способность полета по-самолетному с опорой на фиксированное крыло, способность к зависанию в заданной точке, энергоэффективность выше, чем у БЛА вертолетного типа, простота в использовании.

БЛА мультироторного типа — подкласс БЛА вертолетного типа. Мультикоптер (многовинтовой вертолет) — ЛА вертолетной схемы с двумя и более несущими винтами. Реактивные моменты уравновешиваются за счет вращения несущих винтов попарно в разные стороны или наклона вектора тяги каждого винта в нужном направлении.

Достоинства — низкая стоимость, легкость в управлении, возможность вертикального взлета с неподготовленной площадки и способность зависания в воздухе, высокая точность позиционирования.
Недостатки — малая скорость, высокие энергозатраты, ограниченный радиус действия, малая продолжительность полета.
Мультикоптеры классифицируются по количеству двигателей: бикоптер, трикоптер, квадрокоптер, гексакоптер, октокоптер.
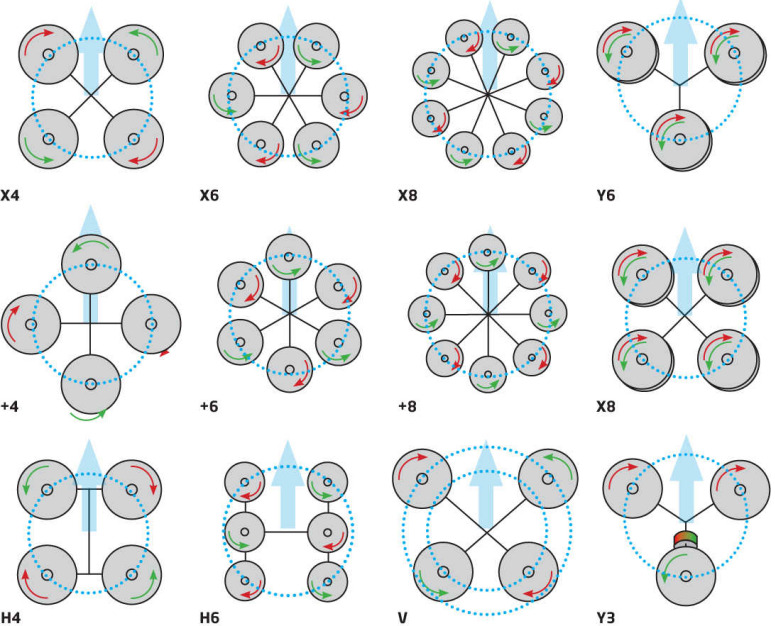
Квадрокоптер — самый популярный мультикоптер, так как четыре жестко зафиксированных роторов дает возможность организовать довольно простую схему организации движения.

Преимущества — простейшая и универсальная конструкция, все доступные на рынке контроллеры полета могут работать с такой мультироторной сборкой.
Недостатки: Отсутствие избыточности (если в системе происходит сбой, особенно в элементах силовой установки, беспилотник падает).
3. ПОЛЕЗНАЯ НАГРУЗКА БЛА
Полезная нагрузка — это оборудование, которое БЛА несет для выполнения различных задач: видеокамеры, тепловизоры, дальномеры, системы сброса, средства поражения и т. д.
Полезная нагрузка может быть сменяемой и несменяемой.

Тип полезной нагрузки зависит от типа решаемой задачи.
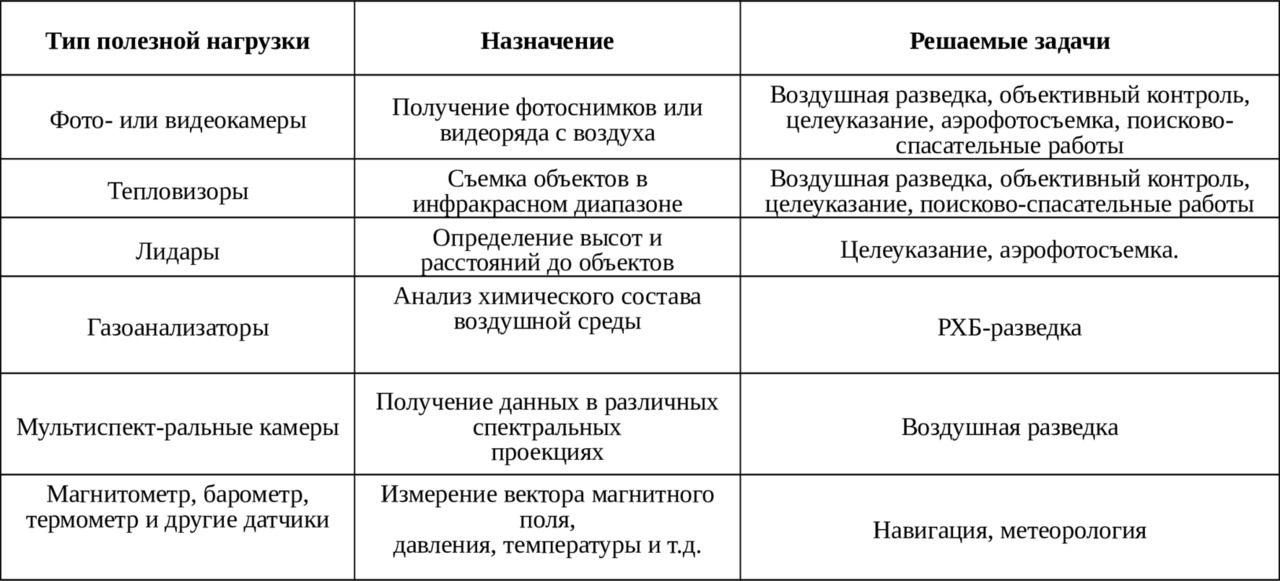
Фото- и видеокамеры
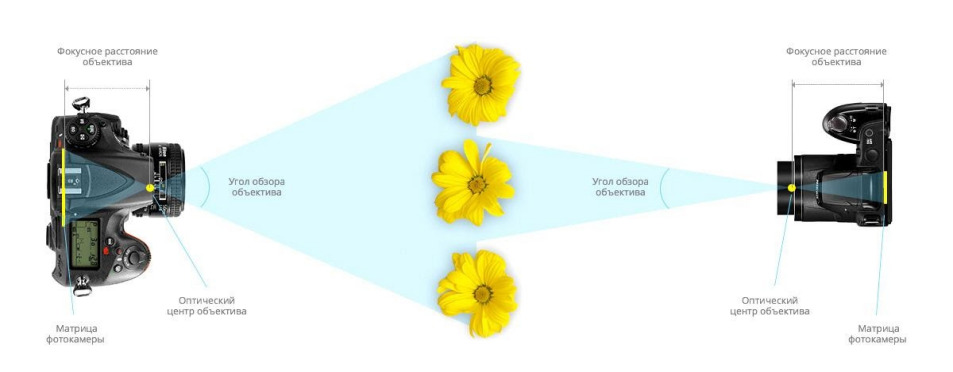
Одним из важных параметров камеры является угол обзора объектива от которого зависит какая площадь наблюдаемого участка попадет в поле зрения камеры. Например, для получения общего обзора участка или тесного помещения нужен объектив с широким углом обзора, а при необходимости сосредоточения на каком-либо определенном объекте — с узким углом обзора.

Угол обзора объектива зависит от двух параметров:
— фокусное расстояние объектива;
— размер чувствительного элемента (матрицы).
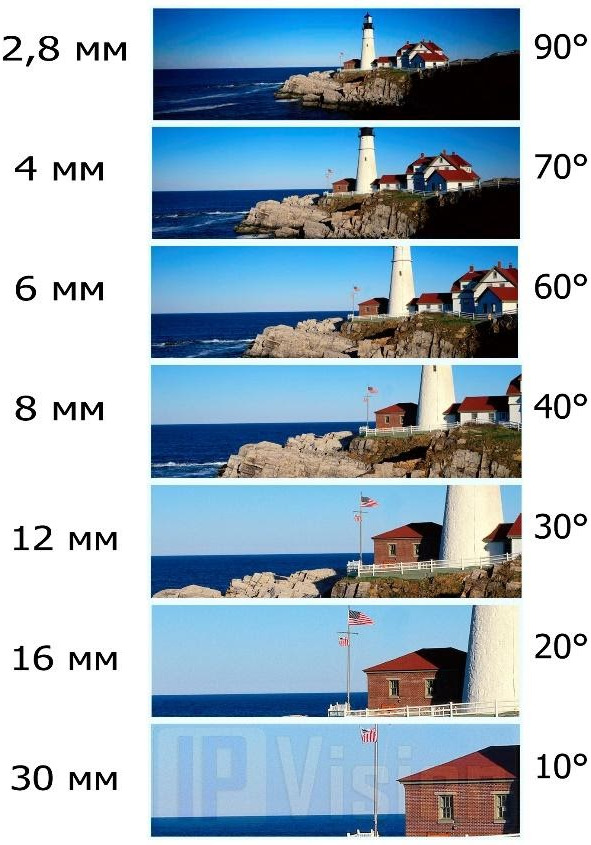
Чем больше фокусное расстояние у объектива камеры, тем меньшим будет угол его обзора, поэтому узкоугольные камеры обладают возможностью наблюдения за относительно удаленными от камеры объектами, а широкоугольные позволяют охватить большую площадь территории или помещения. Но при одинаковых фокусных расстояниях объектива на разных камерах угол обзора будет зависеть еще и от того, каков размер матрицы камеры.
Чем меньше матрица, тем уже угол обзора объектива при том же фокусном расстоянии и наоборот, чем больше матрица, тем шире угол обзора. Например, если на полнокадровой матрице (36х24 мм) объектив с фокусным расстояние 50 мм обеспечивает угол обзора в 45°, то на матрице формата APS-C (25.1х16.7 мм) он уже будет равен 35°. Т.е., чем меньше матрица в камере, тем сильнее объектив с тем же фокусным расстоянием будет приближать объект.
Детализация снимков
При использовании узко- или широкоугольной камеры выявляется еще одна зависимость — детализация получаемых кадров: изображения с высокой детализацией можно получить с помощью узкого угла обзора, а если угол обзора камеры будет шире, то детализация объектов в дали будет значительно ниже.
Широкоугольные объективы позволяют увидеть большую площадь территории, но с меньше детализацией вдали, а узкоугольные объективы позволяют детализировано рассмотреть удаленные объекты.
Абсолютной необходимостью для аэрофотосъемки с коптера является стабилизированный подвес, который устраняет влияния внешних воздействий во время полета коптера (резкие колебания, вибрация и т.д.), приводящих к выходу устройств, расположенных на платформе, из заданного положения. Подвес крепится к нижней части коптера. Конструктивно он представляет собой карданный узел с системой стабилизации и металлическими или пластиковыми рычагами, которые функционируют на электронном или на механическом приводах, не позволяя камере колебаться из стороны в сторону.
Модели подвесов для квадрокоптеров могут быть двухосевые и трехосевые.
Двухосевые подвесы достаточно легкие и потребляют меньше электроэнергии, но обеспечивают только двухосевую стабилизацию видеокамеры: по оси тангажа (ось Х) и оси крена (ось Z).

Трехосевые подвесы несколько тяжелей и дороже двухосевых, но обеспечивают стабилизацию видео с камеры уже по трем осям, тангажа (ось Х) и крена (ось Z) и рыскания (ось Y). Т.е. трехосевые подвесы обеспечивают наилучшую стабильность, чем двухосевые.

Трехосевые и двухосевые подвесы могут оснащаться разными исполняющими механизмами осевых рычагов, приводящихся в действие сервоприводом или бесколлекторным мотором, и отдельным встроенным контроллером с набором датчиков для стабилизации подвеса (гиростабилизированные подвесы).
Мультиспектральные камеры являются мощным инструментом для мониторинга изменений показателей растительности с использованием видимого и ближнего инфракрасного спектра. Полученные показатели с помощью ближнего инфракрасного спектра, позволяют обнаружить изменения растительности до того, как соответствующие изменения проявятся в видимом спектре.
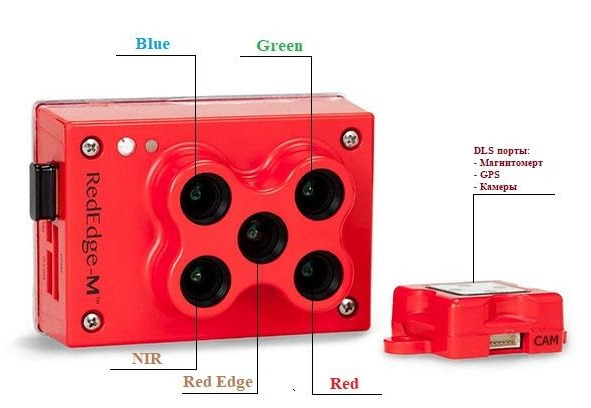
Мультиспектральные камеры имеют два основных сенсора, первый мультиспектральный сенсор снимает цвет, который отражают растения, в четырех разных диапазонах: зеленый и красный свет и два инфракрасных канала, невидимые для человеческого глаза. Второй сенсор, так называемый «солнечный сенсор» размещенный на верхней части БЛА регистрирует интенсивность света, излучаемого солнцем для четырех диапазонов.
Внутри мультиспектрального сенсора «Sequoia» встроен собственный GPS, что значительно повышает точность съемки.
За счет небольшого веса и компактности, мультиспектральные камеры можно подключить к любому БЛА, как мультироторного типа, так и самолетного типа.
Тепловизор — измерительный прибор, который позволяет видеть тепловое (инфракрасное) излучение окружающих объектов в любое время суток, измерять температуру в любой точке на поверхности с высокой точностью и визуализировать его в доступном для человеческого глаза виде.
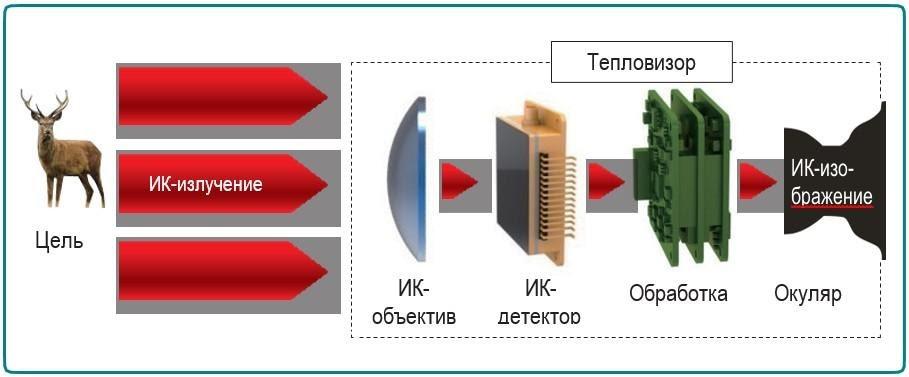
Принципиальная схема действия тепловизора
Основные технические характеристики тепловизора, которыми определяется диапазон его действия:
— тип матрицы;
— фокусное расстояние;
— чувствительность матрицы;
— углы обзора;
— температурный диапазон работы.
Установленный на квадрокоптере тепловизор превращает его в мощный инструмент, способный обнаруживать тепло, исходящее почти от всех объектов и материалов и решать широкий спектр задач.
Лидар или лазерный сканер (LIDAR англ. Light Detection and Ranging «обнаружение и определение дальности с помощью света») — технология получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления поглощения и рассеяния света в оптически прозрачных средах. С помощью такого оборудования создается трехмерное изображение исследуемой местности и предметов.
Лидары для БЛА имеют малые габариты и значительно сокращают различного рода затраты на методы исследования рельефа, по сравнению с методами наземного исследования.
Состав лидара:
— передающая часть;
— приемная часть;
— система управления.
Передающая часть лидара содержит источник излучения — лазер и оптическую систему для формирования выходного лазерного пучка, т.е. для управления размером выходного пятна и расходимостью пучка.
Приемная часть состоит из объектива (телескоп), спектрального и/или пространственных фильтров, поляризационного элемента и фотодетектора (приемник света).
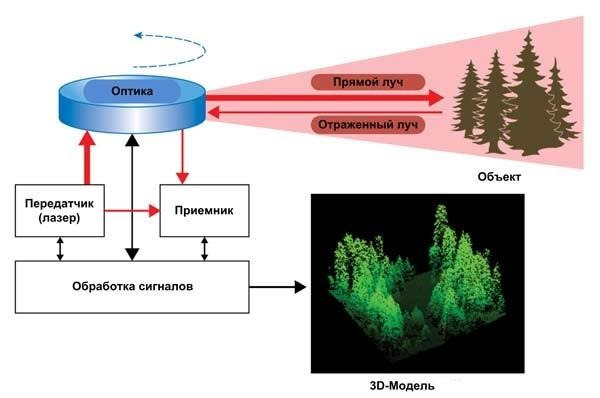
В основе работы лидаров лежит измерении расстояния от источника импульса до исследуемых объектов, то есть система рассчитывает, сколько времени требуется свету, для попадания на объект и отражения обратно в сканер.
Результаты сканирования дают полное представление об исследуемом предмете, описывают его геометрические параметры и могут быть представлены в виде 3-х мерных моделей объекта и рельефа, топопланов, ортопланов, других продуктов.
4. КОНСТРУКЦИЯ БЛА КОПТЕРНОГО ТИПА
Наличие у квадрокоптера четырех жестко зафиксированных электродвигателей (роторов) дает возможность организовать довольно простую схему организации движения, в которой одна пара винтов вращается по часовой стрелке, другая — против. Существуют два типа такой схемы: «+» и «х».
В «+» один из роторов является передним, противоположный ему — задним, два — боковыми.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.